
Pour marquer le 50ème anniversaire de la marque, Jouef a produit il y a qq dizaines d'années une loco vapeur 231 G 276 dite présidentielle, un modèle collector plutôt réussi si l'on en juge par la photo ci-dessus avant passage dans les ateliers biscatrain pour réalisation de qq travaux d'amélioration.
La motorisation d'origine (moteur de type buhler avec volant d'inertie) est de qualité, plus rien à voir avec le 5 pôles classique de Jouef. Toutefois, après qq tests, j'ai constaté que la traction était insuffisante par manque d'adhérence du bogie moteur, ce dernier bien dimensionné se faisant au détriment d'un lest insuffisant. Par ailleurs, le diamètre des roues de petite taille sur ce modèle a tendance à augmenter le phénomène de patinage. Il faut donc revoir la motorisation.

L'éclairage des fanaux AR se fait au travers d'un conduit lumineux rouge en plexiglas qui sera remplacé par des leds bicolores

Les lanternes extérieures pourront être conservées.

Le corps des leds bicolores a été peint en noir mat ainsi que la face intérieure de la caisse du tender.

test d'éclairage avec les feux blancs

et avec les feux rouges. Afin de limiter l'éclairage trop violent, et après plusieurs essais, j'ai inséré une résistance de 10 Kohms sur le blanc et 330 Kohms sur le rouge, ce qui donne un résultat excellent

Le décodeur (un lenz standard +) a été collé sur son support adhésif à l'arrière du tender sous la caisse, ce qui facilite le branchement des leds (bleu + anode commune, jaune - cathode feu blanc en marche AR et blanc- cathode feu rouge en marche AV).

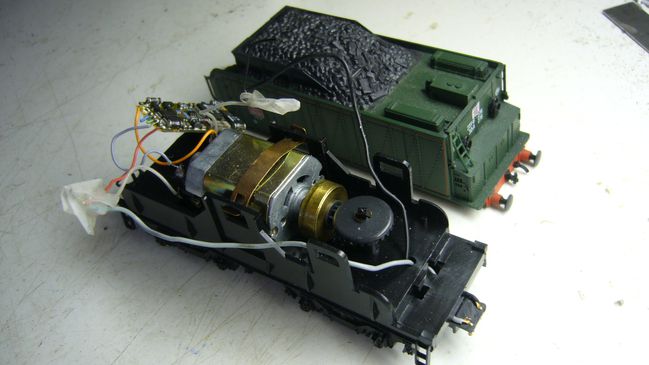
bon, maintenant, passons à la remotorisation, comme pour la 241 P, j'ai utilisé un moteur de type Mabuchi à format réduit (récupération d'un stock de micro moteurs sur Ebay) Celui-ci était équipé d'une vis sans fin en nylon sur arbre de 1,5 mm de diamètre. Il convient donc de créer un manchon pour l'adapter au diamètre du volant d'inertie et du pignon Jouef (2 mm) Pour ce faire, j'ai trouvé une métode rapide et très précise, je fais tourner le moteur avec une pile de 9V, et je le fais glisser sur le banc d'une micro fraiseuse Proxxon, en rognant au fur et à mesure par passes successives la vis sans fin jusqu'à obtenir le diamètre du manchon désiré.

attention quand même aux doigts, le moteur doit être fermement maintenu!!!!

une rapide vérification avec un volant de diamètre 2 mm permet de constater que l'ensemble tourne parfaitement rond.

je peux maintenant enfiler à force le volant d'origine et le pignon Jouef sur le moteur.

j'ai arasé les rebords du châssis, ce qui doit permettre de lester un peu plus le tender vu la taille moindre du moteur. une cale de 3,5 mm d'épaisseur est nécessaire pour réhausser le moteur fixé par encollage (Uhu méga strong and safe).

Il ne reste plus qu'à connecter les roues et le moteur au décodeur (fil rouge rail de droite dans le sens de la marche, fil noir, celui de gauche, fil orange le positif du moteur, fil gris, l'autre borne). j'ai pu rajouter deux lests latéraux mis au gabarit (issus de plombs de pêche), ce qui confère au tender une meilleure assise sur les rails.

La présence de drapeaux avec le sigle RF sur cette loco témoigne d'un convoi "présidentiel" A noter que les feux AV d'origine sont à base de leds (une première chez Jouef!!) Ils sont indépendants du décodeur, alimentés par les roues de la loco, ce qui permet d'actionner ou non les feux AR du tender selon le type de circulation (HLP ou avec un convoi)

S'agissant d'une loco "prestigieuse" , les flancs de roues ont été peints en blanc par Jouef, j'ai souhaité ajouter une légère patine pour supprimer l'effet trop neuf.

Le tender a reçu une couche de vrai charbon beaucoup plus réaliste.

La loco fait ses premiers tours de roue sur le dépôt, le ralenti est excellent et le niveau sonore digne des meilleures productions actuelles.

Dernier réglage du décodeur avant la mise en service:
Vitesse maxi: CV 5 = 150 contre 254 en réglage d'usine
accélération: CV 3 = 30
décélération: CV 4 = 30
le fonctionnement est très souple, la puissance de traction est améliorée, aussi bien en digital qu'en analogique.
Il ne me reste plus qu'à lancer une invitation à notre président Hollande pour un voyage d'inauguration dans les Landes, et j'ai de la place pour tous ses ministres en vacances!!!!
C'est pas gagné!!!
A +
















/image%2F1182624%2F20201206%2Fob_c2491f_p1450777.JPG)